패스트캠퍼스 환급챌린지 47일차 : 자율주행 로봇을 위한 ROS2 & Nav2 한번에 끝내기 강의 후기
본 포스팅은 패스트캠퍼스 환급 챌린지 참여를 위해 작성하였습니다.
오늘은 어제 배운 Nav2 기능 중
핵심 기술인 Path Planning에 대해서 간단하게 알아보았다.
[오늘의 수강 영상]

[오늘의 이론]


Path Planning이란?
로봇이 출발지에서 목적지까지 이동하는
최적 또는 효율적인 경로를 계산하는 과정이다.
이 과정에서 로봇은 주어진 환경의 지도를
기반으로 하여 장애물을 피하고,
가장 적합한 경로를 찾아서 목적지에 도달하도록 설계된다.
우선 Path Planning을 진행하려면
사전에 map_server와 amcl이 먼저 작동되고 있어야 한다.
그 후에 Path Planning과 Nav2를 동작하기 위해서는
아래의 노드들이 필요하다.
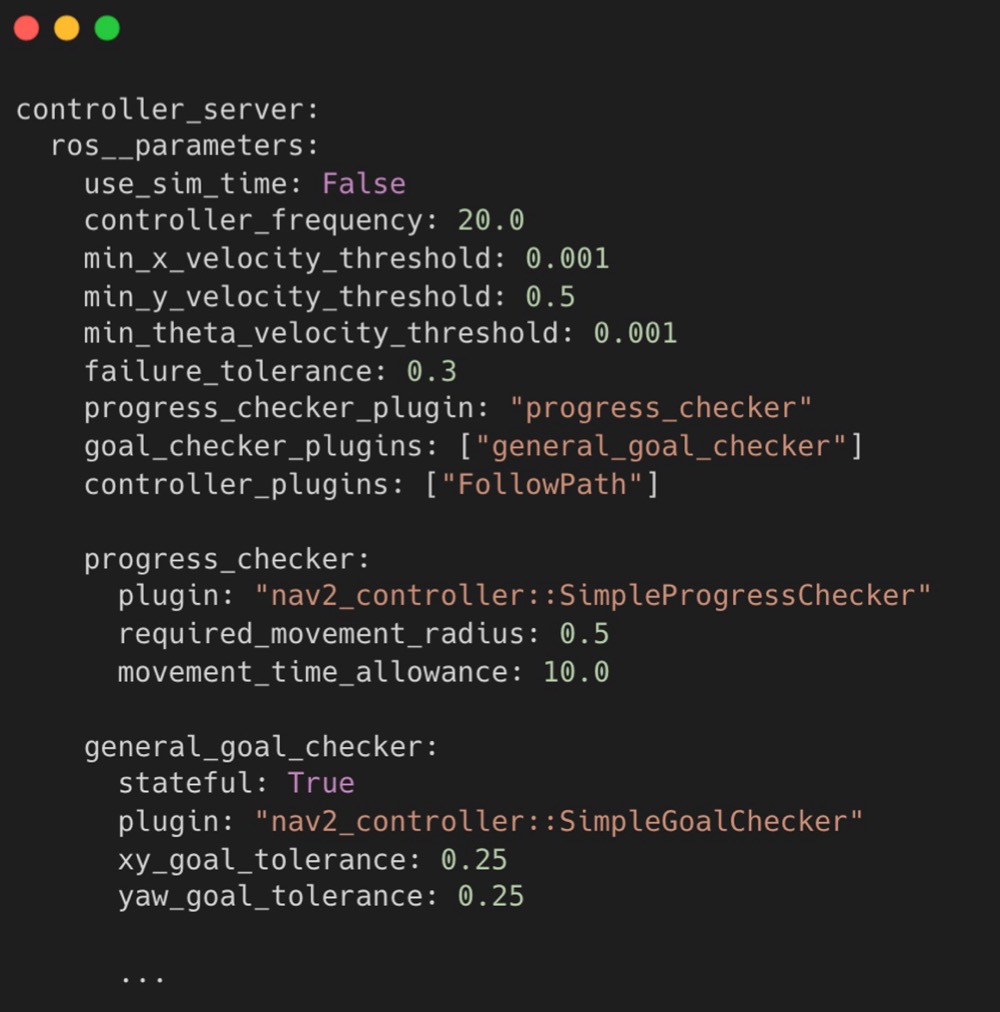
controller_server
smoother_server
planner_server
behavior_server
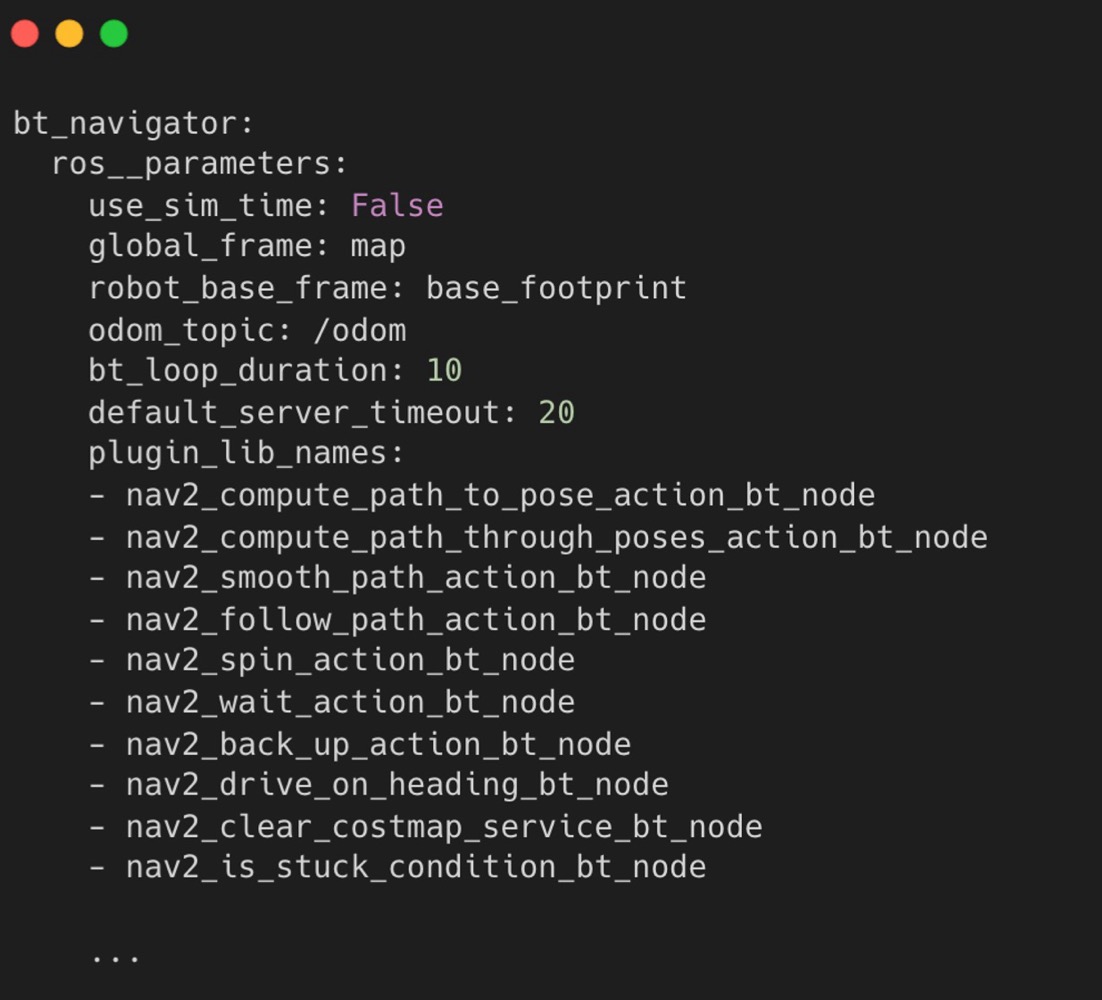
bt_navigator
waypoint_follower
lifecycle_manager
강사님이 여기 있는 모든 노드가
Path Planning을 위한 노드라고 설명해 주셨고
그리고 이것들이 Nav2 기반의 Path Planning을 위한
서버들이라고 말씀해 주셨다.
하지만 이전 Nav2 개요 부분에서도
같은 server들을 설명해 주셔서
찾아본 결과 여기 있는 노드들은
Path Planning 뿐만 아니라
Nav2 전반에 필요한 노드들인 것 같아서
Path Planning과 Nav2 동작에 필요한
노드라고 명명하겠다.
그리고 Nav2 기반의 Path Planning을 위한
설정파일은 아래와 같은 것들이 있다.
1. controller_server
로봇이 목표 지점으로 이동할 때
경로를 따라가도록 제어하는 서버이다.
2. planner_server
로봇이 출발 지점에서 목표 지점까지
이동할 경로를 계획하는 서버이다.

3. behavior_server
로봇의 동작과 행동을 관리하고 조정하는 서버이다.

4. bt_navigator
행동 트리(Behavior Tree)를 사용하여
로봇의 탐색 및 navigation을 관리한다.
5. waypoint_follower
로봇이 여러 개의 경유 지점을 순차적으로 따라갈 수 있도록 한다.

6. global_costmap
로봇의 전체 환경에 대한 전역적인
costmap(비용 지도)를 생성하여 경로 계획에 사용된다.

7. local_costmap
로봇 주변의 가까운 환경에 대한 지역적인
costmap을 생성하여 충돌 회피와 로컬 경로 추종에 사용된다.

Path Planning과 Nav2 동작에 필요한
노드들과 Nav2 기반의 Path Planning을 위해
필요한 노드들이 어떤 것들이 있는지 알아보았다.
아직 너무 간략하게만 배워서
정확하게 감이 잘 안 잡히는 것 같다.
강의 자료를 보니 앞으로 이것들 하나하나에
대해서 더 자세히 설명해 주시고
이것들을 사용해서 실습도 진행하는 것 같아서
앞으로 실습을 통해 직접 체험하면서
정확하게 익혀야겠다.


#패스트캠퍼스 #직장인자기계발 #직장인공부 #환급챌린지 #패스트캠퍼스후기 #오공완
커리어 성장을 위한 최고의 실무교육 아카데미 | 패스트캠퍼스
성인 교육 서비스 기업, 패스트캠퍼스는 개인과 조직의 실질적인 '업(業)'의 성장을 돕고자 모든 종류의 교육 콘텐츠 서비스를 제공하는 대한민국 No. 1 교육 서비스 회사입니다.
fastcampus.co.kr