패스트캠퍼스 환급챌린지 24일차 : 자율주행 로봇을 위한 ROS2 & Nav2 한번에 끝내기 강의 후기
본 포스팅은 패스트캠퍼스 환급 챌린지 참여를 위해 작성하였습니다.
오늘은 ROS2 환경에서 다양한 목적으로 사용되는
디버깅 도구들에 대해 알아보았다.
[오늘의 수강 영상]
[오늘의 필기]


첫번째는 Logger!
Logger란?
ROS 2의 로깅 시스템이며
시스템 내에서 발생하는 이벤트나 데이터를
로그에 기록하여 디버깅을 가능하게 하는 tool이다.
다양한 로그 레벨을 설정하여
필요한 정보만 필터링하여 볼 수 있는데
DEBUG, INFO, WARN, ERROR, FATAL
단계로 구성되어져 있다.

DEBUG : 상태변화를 기록하는데 사용되며 개발단계에서 사용된다.
INFO : 운영정보를 출력할 때 사용된다.
WARN : 잠재적 문제에 대한 경고를 출력할 때 사용된다.
ERROR : 시스템에 심각한 문제가 발생됐을 때 그 문제를 출력할 때 사용된다.
FATAL : 시스템이 작동할 수 없을 정도의 문제가 발생할 때 사용된다.
이 로그 출력은 터미널 및 콘솔에서 뿐만 아니라
로깅 파일로도 저장할 수 있다.
두번째는 Rviz2!
Rviz2란?
ROS 2의 3D 시각화 도구로서 로봇의 상태, 센서 데이터, 주변 환경, 맵 등을
실시간으로 시각화하는 tool이다.
이는 사용자 인터페이스를 통한 직관적인 데이터 시각화 제공한다.
주요 Display Types에는 아래와 같은 내용들이 있다.
1. 기본 표시 관련: RobotModel, TF, Grid
2. 센서 데이터 관련: LaserScan, PointCloud2, Image
3. 네비게이션 관련: Map, Path, Odometry


세번째는 RQt!
RQt란?
GUI 개발 프레임워크이자
다양한 시각화/디버깅 도구들의 모음을 가진 tool이다.
이는 직접 플러그인 개발도 가능하며
Qt 기반의 플러그인 방식 인터페이스로 다양한 도구를 하나의
창에서 통합 관리 가능하다.
주요 플로그인은 아래와 같다.
1. 시스템 모니터링 관련: Node Graph, Topic Monitor, Process Monitor, Logger Level
2. 시각화 관련: Plot, Image View, TF Tree
3. 통신/인터페이스 관련: Service Caller, Topic Publisher, Message Type Browser


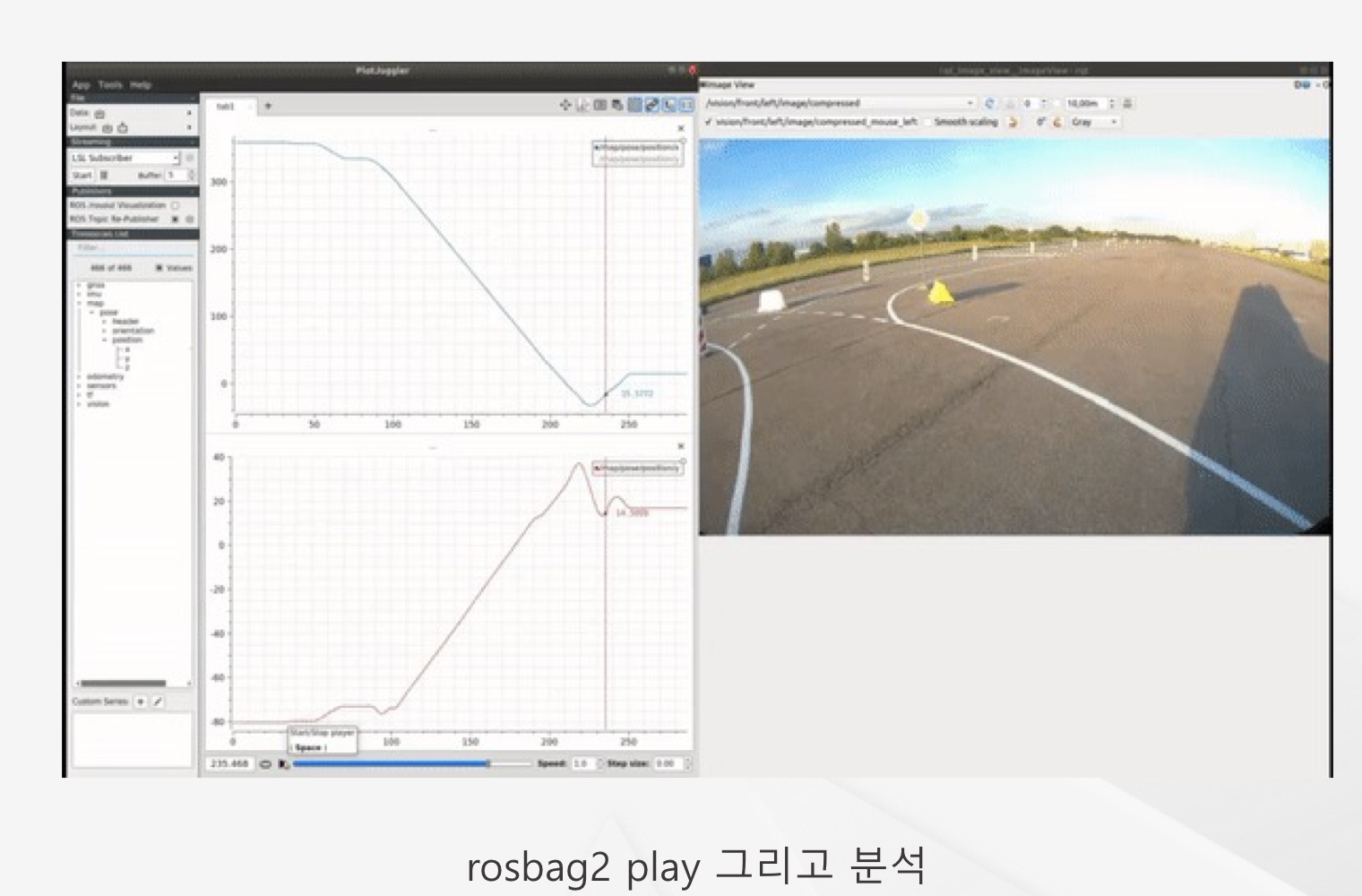
네번째는 rosbag2!
rosbag2란?
데이터 로그를 기록하고 재생할 수 있는 도구이다.
이는, 디버깅과 데이터 분석에 활용되며
로봇 시스템에서 발생하는 데이터 흐름을 파일로 기록하고
이후에 분석하거나 재생할 수 있기 때문에 테스트 환경 재현이 가능하다.
주요기능에는 아래와 같다.
1. 데이터 기록 및 재생
2. 데이터 필터링 및 선택적 기록
3. 녹화 중 데이터 분할 저장
하지만, ROS ↔ ROS 2 간 로깅 파일은
호환되지 않기 때문에 변환 과정 필요하다고 한다.
학교에서 visual SLAM을 하거나
bag파일을 사용할 일이 많아서
rosbag명령어를 ROS 1에서 많이 사용했었는데
저런 화면을 보면서 해본 적은 없어서
저 화면은 어떻게 보는건지 궁금해서
rosbag2 영상을 볼 때 더 자세히 보아야겠다!
또한 앞으로 ROS 2로 넘어갈 것이기 때문에
이걸 알아두면 알차게 사용할 수 있을 것 같다.
마지막으로 ROS2 Doctor!
ROS2 Doctor란?
ROS 2 시스템의 상태와 설정을 검사하고 진단하는 데 사용되는 명령어이다.
이는, ROS 2 환경의 다양한 측면을 검사하여
문제가 있는지 확인하고, 가능한 해결책을
제공하는 목적으로 만들어졌다.
이를 통해, 네트워크 문제, 패키지 의존성 문제,
올바르지 않게 설정된 환경 변수 등을
찾아낼 수 있다.
이를 사용하면 아래와 같은 7개 섹션으로 구성된
상세 분석 자료를 얻을 수 있다.
1. NETWORK CONFIGURATION
2. PLATFORM INFORMATION
3. QOS COMPATIBILITY LIST
4. RMW MIDDLEWARE
5. ROS 2
6. INFORMATION
7. TOPIC LIST
ROS2 Doctor가 ROS2가 생기면서
나온 새로운 tool이라고 들었는데
설명으로만 들었을 때는 지금까지 하나하나
문제를 찾는 과정을 많이 줄여줄 수 있을 것 같아서
기대가 되지만 또 어떻게 될지 모르니
실습을 통해 알아보고 결정하고자 한다.
이와 같이 강의를 통해 여러가지 tool을
알아보았고 내일은 logger실습을 진행하고
일요일에 저번에 듣던 강의의
실습 부분을 마친 후 나머지 tool들을
실습을 통해 만나볼건데
앞으로도 계속해서 쓰게될 tool들인 만큼
이번에 배우고 까먹지 않게 두고두고
복습을 해야겠다는 생각이 들었다.

#패스트캠퍼스 #직장인자기계발 #직장인공부 #환급챌린지 #패스트캠퍼스후기 #오공완
🚨[D-4] 4월 1일 00시 강의 가격 최대 13% 인상! | 패스트캠퍼스
3월 31일 이후 비싸집니다. 가격 인상 전 지금이 3월 마지막 기회! 지금 바로 시작하세요.
fastcampus.co.kr